Test results
Log output
Colors:
Blue: A firmware build or test has just started.
Green: A firmware build or a test has successfully finished.
Orange: A test has failed.
Red: There was an error.
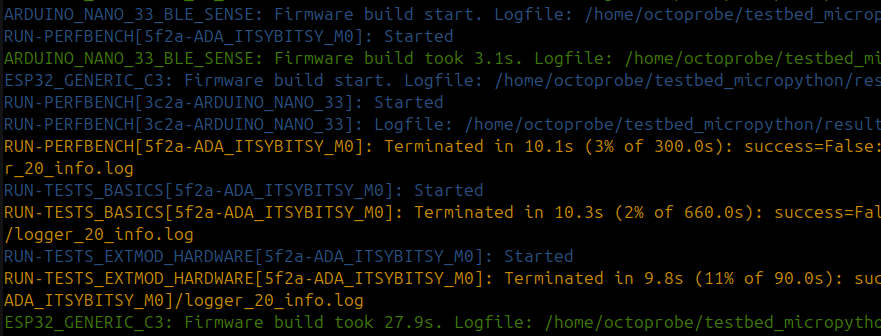
Note
Lines starting with ESP32_GENERIC_C3:: You see where the firmware build starts (blue) end ends (green).
Lines starting with RUN-PERFBENCH[5f2a-ADA_ITSYBITSY_M0]:: You see where the test starts (blue) and where it fails (orange).
python logging
We use python logging. There will always be written 3 files in parallel:
logger_10_debug.log # Contains logging.debug and above
logger_20_info.log # Contains logging.info and above
logger_40_error.log # Contains logging.error and above
You probably want to have a look at logger_40_error.log to know if an error happened. If yes, have a look at logger_20_info.log to see the error AND info messages. Etc.
Summary of test succeed / failed / skip / error
The is NO such summary yet.
Timing Report
The timing report is written in three formats: task_report.md / .txt / .html
Timing report gives an overview of the time axis. All tentacles should be used all the time. The latest tentacle is the bottleneck.
Columns mpbuild, A, B, C: These are the lockable resource.
Task a, b, c: These are the firmwares which have been build by the FirmwareBartender process.
Task 2(b,c): This is Task 2 which is using two tentacles with the firmware b and c.
This timing report is short and compact. The downside is, that you have too lookup the tantacles and tasks in the other tables.
Report input data: This is the raw input data which was used to build the Timing report.
Timing report
=============
start duration mpbuild A B C
0.0s +3.5s a . . .
3.5s +7.5s b . 1(a) .
11.0s +1.0s . 2(b,c) 1(a) 2(b,c)
12.0s +0.5s . 2(b,c) . 2(b,c)
12.5s +2.0s c 2(b,c) 3(b) 2(b,c)
14.5s +0.5s c 4(b,c) 3(b) 4(b,c)
15.0s +3.0s c 4(b,c) . 4(b,c)
18.0s +1.0s c . . .
19.0s . . . .
Legend: Tentacles
-----------------
Tentacle-ID Tentacles
mpbuild mpbuild
A Lolin
B PICO
C PICO2
Legend: Tasks
-------------
Task-ID Task Tentacle Duration
a Build PICO2 3.5s
b Build PICO2-RISCV 7.5s
c Build ESP8266 6.5s
1 Test X PICO(PICO2) 8.5s
2 Test Test X PICO2(PICO2-RISCV), Lolin(ESP8266) 3.5s
3 Test Y PICO(PICO2-RISCV) 2.5s
4 Test Test Y PICO2(PICO2-RISCV), Lolin(ESP8266) 3.5s
Report input data
-----------------
Start End Duration Task Tentacles
0.0s 3.5s 3.5s Build PICO2
3.5s 11.0s 7.5s Build PICO2-RISCV
3.5s 12.0s 8.5s Test X PICO(PICO2)
11.0s 14.5s 3.5s Test Test X PICO2(PICO2-RISCV), Lolin(ESP8266)
12.5s 15.0s 2.5s Test Y PICO(PICO2-RISCV)
12.5s 19.0s 6.5s Build ESP8266
14.5s 18.0s 3.5s Test Test Y PICO2(PICO2-RISCV), Lolin(ESP8266)
mpbuild build results
There is a folder for every firmware variant.
docker_stdout.txt is the output of the mpbuild docker container and may be followed in real time (tail -f docker_stdout.txt).
├── mpbuild
│ ├── ESP32_GENERIC_S3
│ │ ├── docker_stdout.txt
│ │ ├── firmware.bin
│ │ ├── firmware.spec
│ │ ├── logger_10_debug.log
│ │ ├── logger_20_info.log
│ │ └── logger_40_error.log
│ ├── RPI_PICO2
│ │ ├── docker_stdout.txt
│ │ ├── firmware.spec
│ │ ├── firmware.uf2
│ │ ├── logger_10_debug.log
│ │ ├── logger_20_info.log
│ │ └── logger_40_error.log
│ ├── RPI_PICO2-RISCV
│ │ ├── docker_stdout.txt
│ │ ├── firmware.spec
│ │ ├── firmware.uf2
│ │ ├── logger_10_debug.log
│ │ ├── logger_20_info.log
│ │ └── logger_40_error.log
RUN-xxx test results
There is a folder for every testgroup. A testgroup is one call of run-tests.py which is uniquly identified by the testid.
The testid is:
RUN-MULTITESTS_MULTIBLUETOOTH: The name of the test.
,a: If –count=3 this will be ,a, ,b and ,c.
1830-LOLIN_C3_MINI: The tentacle under test. 1830 is the tentacle serial number.
-first / -second: Tests with MULTI in there name defines roles, for example -first for WLAN-STA and -second for WLAN-AP.
testresults.txt is the output of the testprogram and may be followed in real time (tail -f testresults.txt).
├── RUN-MULTITESTS_MULTIBLUETOOTH,a@1830-LOLIN_C3_MINI-first
│ ├── logger_10_debug.log
│ ├── logger_20_info.log
│ ├── logger_40_error.log
│ └── testresults.txt
├── RUN-MULTITESTS_MULTIBLUETOOTH,a@1830-LOLIN_C3_MINI-second
│ ├── logger_10_debug.log
│ ├── logger_20_info.log
│ ├── logger_40_error.log
│ └── testresults.txt
├── RUN-PERFBENCH,a@2731-RPI_PICO2-RISCV
│ ├── flashing_stout.txt
│ ├── logger_10_debug.log
│ ├── logger_20_info.log
│ ├── logger_40_error.log
│ └── testresults.txt
├── RUN-PERFBENCH,a@2731-RPI_PICO2
│ ├── flashing_stout.txt
│ ├── logger_10_debug.log
│ ├── logger_20_info.log
│ ├── logger_40_error.log
│ └── testresults.txt